Transformers devine realitate. A fost creat primul robot umanoid care zboară. Cercetătorii au realizat prima decolare verticală reușită a unui robot asemănător omului, un pas important către roboții zburători care imită capacitățile umane.
Transformers devine realitate. A fost creat primul robot umanoid ce zboară. Poate salva vieți
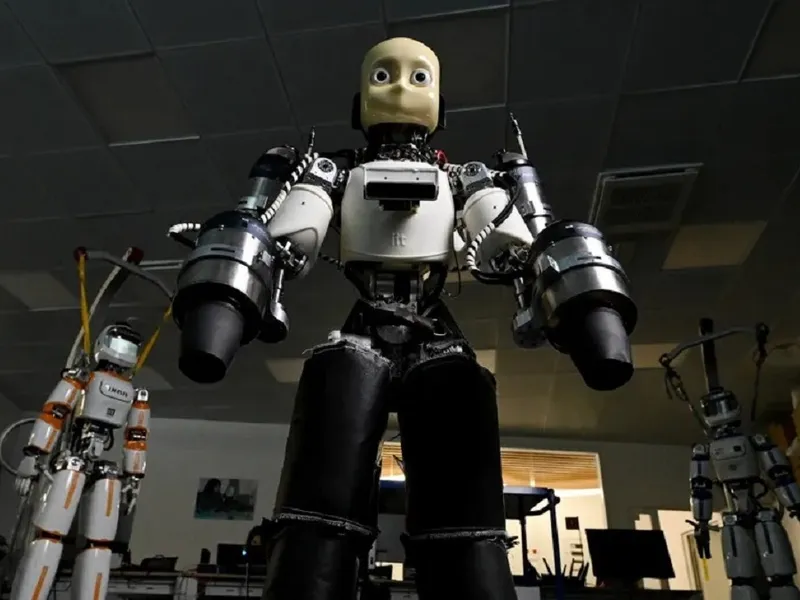
Noul robot, numit iRonCub MK3, folosește patru propulsoare pentru a obține tracțiune verticală, două încorporate în brațe și două într-un jetpack montat pe spate.
În imaginile publicate de Institutul Italian de Tehnologie (IIT) pe YouTube pe 18 iunie, robotul cu mască este ținut de un suspensor, apoi se activează și se ridică la aproximativ 50 de centimetri de sol folosind propulsoarele sale.
Robotul iCub pe care se bazează umanoidul IIT are dimensiuni și aspectul unui copil. Are o înălțime de 1 metru și o greutate de 22 de kilograme, adoptând dimensiuni asemănătoare celor ale unui copil și având un cap „de bebeluș” neted și strălucitor, ușor de recunoscut.
Lansat pentru prima dată în 2009 de către Consorțiul RobotCub al universităților europene, acesta este conceput pentru a fi un banc de testare pentru cercetarea în domeniul cogniției umane și al inteligenței artificiale (IA) și a fost utilizat în nenumărate proiecte în ultimii 16 ani.
Într-un studiu care descrie robotul, publicat pe 1 iunie pe serverul de preprinturi arXiv, inginerii IIT afirmă că versiunea lor îmbunătățită a robotului este primul robot umanoid zburător cu propulsie jet conceput pentru a decola, conform livescience.com.
Ei au adăugat că această lucrare evidențiază noile posibilități pe care le oferă un robot umanoid zburător.
Citește și: VIDEO Nu găsești zidari? Un robot rezolvă problema. Ridică 10 m² de zidărie pe oră la milimetru
Spre deosebire de multe alte platforme robotice aflate în prezent în dezvoltare, care se concentrează în mod exclusiv pe locomoție și manipulare la sol, adăugarea mobilității aeriene poate deschide calea pentru asistență în misiuni de căutare și salvare, traversarea clădirilor prăbușite și a zonelor inundate sau a altor terenuri inaccesibile oamenilor, au afirmat oamenii de știință în studiu.
Combinând zborul cu capacitatea de a interacționa cu mediul înconjurător, un robot de acest tip ar putea curăța resturile și ar putea ajuta la localizarea sau chiar la extragerea victimelor.
Autorii studiului subliniază, de asemenea, că un robot umanoid zburător ar putea efectua reparații la structuri greu accesibile oamenilor, cum ar fi partea inferioară a podurilor. Acestea ar putea fi chiar utilizate în medii periculoase, unde oamenii nu pot opera în siguranță, cum ar fi locul unei scurgeri nucleare sau chimice.
iRonCub se bazează pe platforma iCub3 a IIT. Acest sistem este conceput pentru a permite unui robot să imite o serie de capacități umane, fiind controlat de la distanță de un operator care poartă un cască de realitate virtuală (VR) cu afișaj frontal (HUD) și alte echipamente specializate.
Pentru a echipa iCub pentru zbor, echipa a adăugat suporturi de montare rezistente la sarcini pentru a fixa jetpack-ul și o nouă coloană vertebrală din titan pentru a-i susține greutatea.
Primul robot umanoid care zboară are față de bebeluș
Deoarece versiunile anterioare ale iRonCub aveau probleme cu aprinderea din cauza gazelor de eșapament ale propulsoarelor, au fost adăugate panouri și capace rezistente la căldură la șasiul iCub.
Unghiul de înclinare al propulsoarelor a fost, de asemenea, ajustat pentru a contribui la stabilitatea în zbor și pentru a îndepărta gazele de eșapament de corpul robotului.
Citește și: Prima ediție a Jocurilor Olimpice pentru roboți humanoizi va avea loc în Grecia. Ce probe vor fi?
Pentru această versiune, antebrațele și mâinile robotului au fost îndepărtate pentru a face loc propulsoarelor montate pe brațe, dar echipa spune că antebrațele sunt încă pe deplin compatibile și vor fi readăugate în versiunile ulterioare.
Pentru a se asigura că șasiul poate suporta stresul decolării și zborului, echipa a efectuat o analiză prin metoda elementelor finite (FEM) — o tehnică de rezolvare a problemelor care se concentrează pe divizarea unei structuri în componente mai mici interconectate.
Ca rezultat, au aplicat sarcini axiale de 750 newtoni (de trei ori forța maximă de propulsie a fiecărei turbine) pe suporturile motoarelor cu reacție.
Una dintre provocările majore ale realizării zborului cu un robot umanoid de acest tip este luarea în calcul a tuturor articulațiilor și punctelor de acționare și ajustarea acestora, precum și a propulsoarelor, într-un mod coordonat, astfel încât robotul să nu zboare în afara cursului sau cu capul în jos.
Inginerii au reușit acest lucru cu ajutorul unui sistem numit Linear Parameter Varying Model Predictive Control (MPC), un controler de zbor complex care calculează în permanență poziția optimă a articulațiilor și accelerația jetului.
Citește și: Așa arată primii roboți erotici controlați prin Bluetooth. Un sexbot în mărime naturală costă 1.600$
Oamenii de știință au testat extensiv sistemul mai întâi în simulări pe computer, înainte de a lansa testele în lumea reală, în mare parte din cauza riscurilor de siguranță asociate funcționării propulsoarelor cu temperaturi de evacuare care depășesc 600 grade Celsius.
După ce a demonstrat cu succes o lansare cu o traiectorie predefinită și o urmărire precisă, echipa intenționează acum să-și concentreze eforturile pe îmbunătățirea controlerului de zbor pentru a face față perturbărilor externe care pot apărea în timpul unui scenariu de zbor real, cum ar fi vântul sau alte condiții meteorologice nefavorabile.

























